ROS介绍
1、什么是ROS?
The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. And it’s all open source.
ROS是完全开源的机器人操作系统,具有一套完整的软件库和工具,使用比较完善的数据报格式和通信方案。由于它的完全开源,在机器人领域中被广泛使用,使用ROS提供的软件库能够实现不同硬件的互相通信,同时,ROS还是一个天然具有分布式特性的操作系统,多台计算机上部署ROS可以通过其中一台指定为MASTER即可实现互联。
2、ROS的安装
本文所有的操作都是基于Ubuntu系统,Ubuntu是Linux系统的一版发行商,界面相对友好一点。按照[安装教程](melodic/Installation/Ubuntu - ROS Wiki)操作。
首先打开终端,快捷键ctrl+alt+t。
Setup your sources.list
官方源:
1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
USTC源:
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
清华源:
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
查看需要注册的Key
在做完上面的操作后,即可进行apt的缓存的更新
1 | sudo apt update |

上面的提示中有缺少公钥提示:
1 | The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654 |
其中F42ED6FBAB17C654就是我们下一步需要添加的公钥!
Note:需要自己做一下这个操作,不同版本是不同的。
Set up your keys
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key F42ED6FBAB17C654 |

这样就算导入密钥成功了。
再次更新APT的缓存
1 | sudo apt update |
这一部必须要做,更新APT缓存才能够检索到ROS的包
正式安装ROS
1 | sudo apt install ros-melodic-desktop-full |
注意:其中melodic是ubuntu18.04系统的ROS的版本号,ubuntu16.04是kinetic, ubuntu20.04是noetic。根据ubuntu版本选择正确的版本号。
Tips:在输入到ros-的时候,不知道版本号的话,使用Tab键可以提示

然后按下回车键,即可显示所有以ros开头的包名
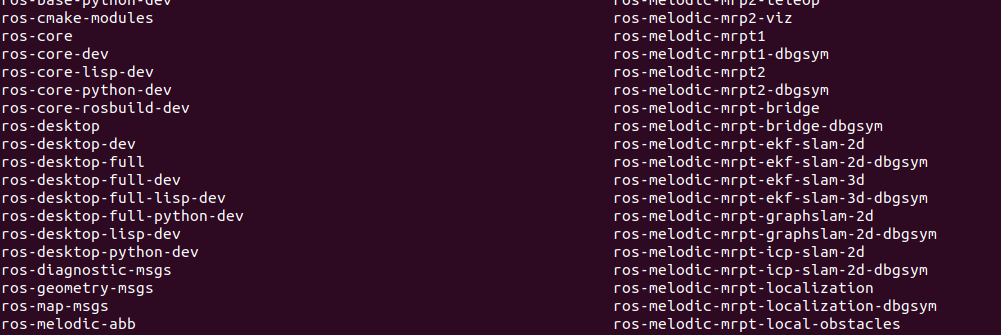
可以看到出现了melodic的版本号
我们不要展示所有的包名,看到合适的就够了。然后使用ctrl+c退出。
亦或者可以使用
1 | sudo apt-cache search desktop-full |

这样同样能够得到版本号为melodic。
在执行上述命令安装ros,安装时会提示是否同意安装,输入yes,回车。
设置系统环境
这一步类似于在Windows系统中添加环境变量:
1 | echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc |
完成上述命令,即可直接在命令行中输入roscore启动ROS MASTER节点。
1 | roscore |
安装ROS常用的依赖
1 | sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential |
初始化ROSDEP
1 | sudo rosdep init |
这一步可能会失败,因为 网络不稳定,使用VPN或者代理即可解决问题。若没有代理软件,可以使用本地静态安装的方式,网上有很多教程。
更新ROSDEP
1 | rosdep update |
至此,就完成了ROS的安装。
3、ROS的简单使用
启动roscore
1
roscore
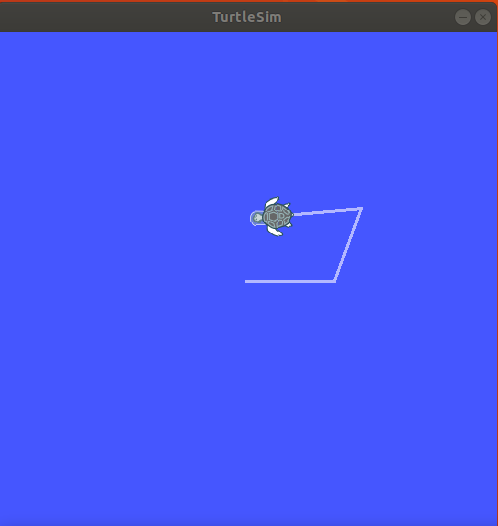
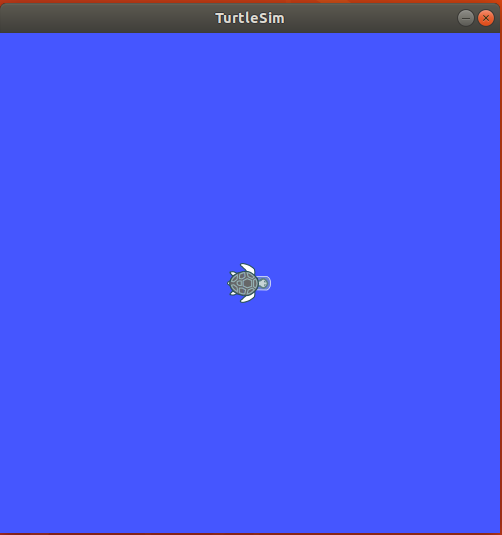
启动turtlesim节点
rosrun turtlesim turtlesim_node
启动键盘控制节点
rosrun turtlesim turtle_teleop_key
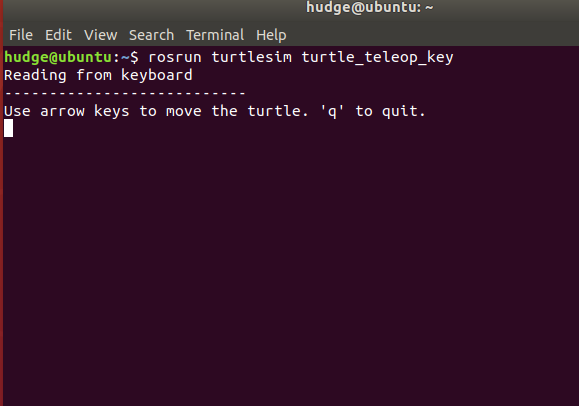
这个使用按↑↓←→键即可实现移动。按q键退出。